購入品
- リニア・アクチュエータ(平面台をX,Y軸方向に上下させる為)
- 平面台支持用フレキシブル三脚(100円ショップ等で購入可能)
- 平面台とリニア・アクチュエータの接続用回転プレート(モノタローで購入:P-1192)
- 回転接続可能なヒンジを2個(X,Y軸用)
- 平面台とフレキシブル三脚カメラ接続用固定プレート(カメラマウント1個)
- リニア・アクチュエータ、三脚固定金具
- 適当な複数個の金具を用意
リニア・アクチュエータの取り付け

- 平面台とフレキシブル三脚との接続は、自由に動けるようにネジ止めはしない
- 平面台の裏面中心に「固定プレート」をネジ止め
- 平面台側面の2か所(直角の位置)にX,Y軸用リニアアクチュエータを取り付け
- 右の写真の様に、平面台が土台と並行な位置で、サーボモータの90°位置でリニア歯と「回転プレート」のネジで固定
- 「回転プレート」とリニア・レール間にゴム等を挿入しで固定
- 最後にリニア・アクチュエータと土台を金具などで固定
micro:bit ブロックコード作成
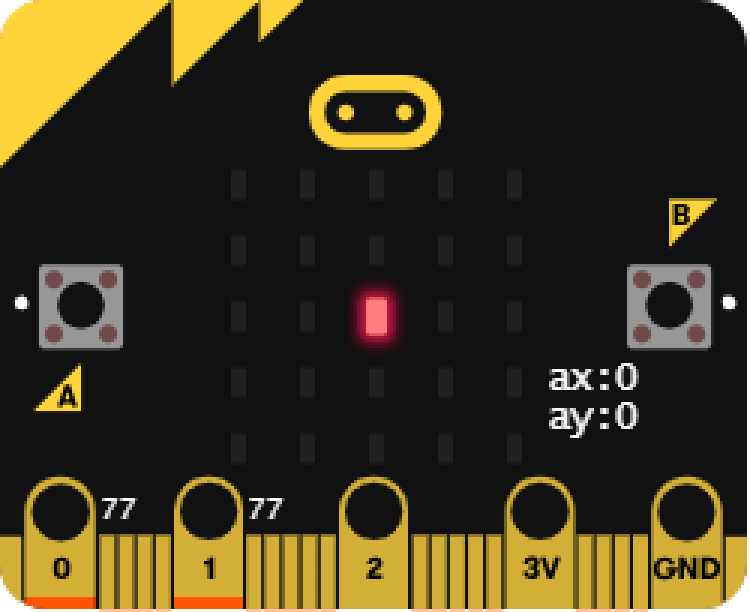
作成するコードは、以前投稿した加速度センサーとサーボモーターのコードを結合したもので、サーボモーターの制御に関しては、レスポンス重視でアナログ出力方式を採用している。
ポイントは、加速度センサーから取得される -1023~+1023 間の値をサーボーモーターへ出力するPWMのパルス幅の 最小値~最大値 にマッピングする部分。
作成したブロックコードのリンクは以下。
FlatTableRobotV1
Made with ❤️ in Microsoft MakeCode for micro:bit.
makecode.microbit.org
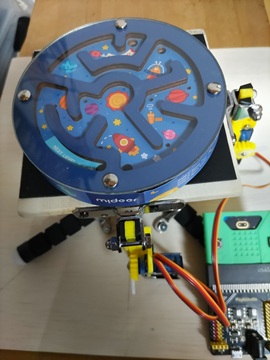
実迷路ゲームを操作する
箱を傾けて中の玉を誘導する迷路ゲームを平面台ロボットに載せて mincro:bit で操作。
リニア・アクチュエータのレスポンスが結構良く、途中のクボミに球が入っても素早く動かす事で脱出もできるが、ゴールするのはかなり難しい。
下記動画は途中の穴に入ってしまいゲームオーバー。


コメント