
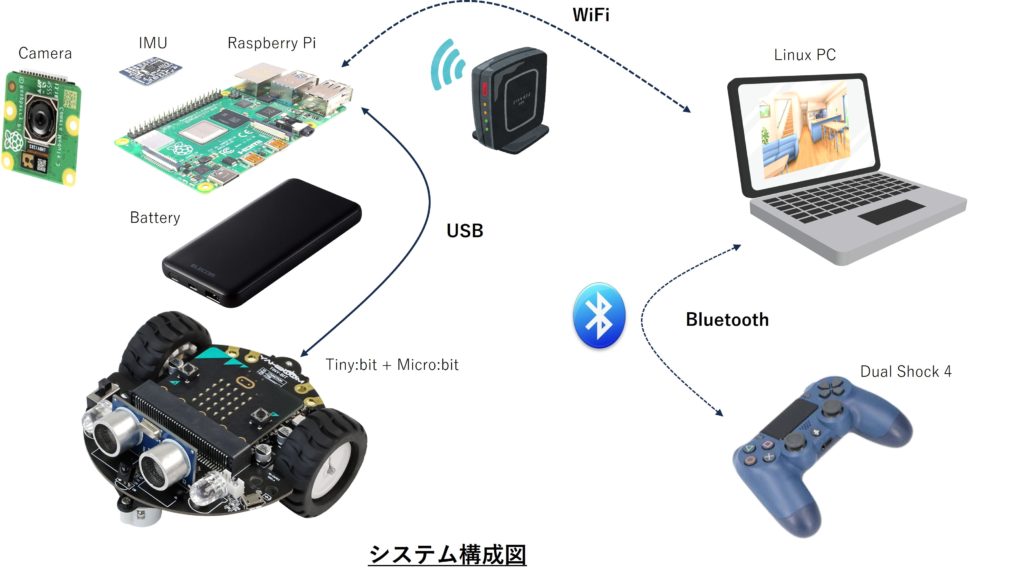
システム構成要素
- 車両ハードウェア tiny:bit
- 車両コントローラ micro:bit
- サブコントローラ Raspberry Pi 4
- サブコントローラ電源 モバイルバッテリー
- 走行画像撮影 Raspi Camera
- IMU 9軸センサーモジュール(BNO055)
- メインコントローラ Linux PC(ubuntu220.04LTS@note PC)
- 操作用ジョイステック Dual Shock 4
Raspberry Pi 4準備
インストール
- 最新64bit OS Trixie版をインストール
- OpenCV(画像操作用):$sudo apt-get install python3-opencv
- Picamera2(Camera用):$sudo apt install python3-picamera2
- Raspi Camera動作確認
- OSがBookworm版以降はインストール時点でカメラは有効
- 以下のpython3スクリプトで確認
import cv2
from picamera2 import Picamera2
picam = Picamera2()
picam.configure(picam.create_preview_configuration(main={"format": 'XRGB8888', "size": (640, 480)}))
picam.start()
while True:
img = picam.capture_array()
cv2.imshow("Camera", img)
key = cv2.waitKey(1)
# Escキーを入力されたら画面を閉じる
if key == 27:
break
picam.stop()
cv2.destroyAllWindows()メインコントローラ ⇔ サブコントローラ間通信
通信方式
- 無線通信:WiFi
- ローカルIPアドレス:192.168.xx.xx
- TCP Socket Port:5569 / 5570 / 5571
- TCP Socket Server & Client
通信データ
- 走行前方画像:format: XRGB8888, size: 640×480 JPEG(品質70%)
- 走行時左右車輪駆動データ:±0.000~1.000(浮動小数点以下3桁)
- IMUデータ:Gyro / Euler / Gravity
TCP Socket Server Script (Python3)@Sub Controller
import socketserver
class MyTCPHandler(socketserver.BaseRequestHandler):
"""
The request handler class for our server.
It is instantiated once per connection to the server, and must
override the handle() method to implement communication to the
client.
"""
def handle(self):
# self.request is the TCP socket connected to the client
pieces = [b'']
total = 0
while b'\n' not in pieces[-1] and total < 10_000:
pieces.append(self.request.recv(2000))
total += len(pieces[-1])
self.data = b''.join(pieces)
print(f"Received from {self.client_address[0]}:")
print(self.data.decode("utf-8"))
# just send back the same data, but upper-cased
self.request.sendall(self.data.upper())
# after we return, the socket will be closed.
if __name__ == "__main__":
HOST, PORT = "localhost", 9999
# Create the server, binding to localhost on port 9999
with socketserver.TCPServer((HOST, PORT), MyTCPHandler) as server:
# Activate the server; this will keep running until you
# interrupt the program with Ctrl-C
server.serve_forever()TCP Socket Client Script (Python3)@Main Controller
import socket
import sys
HOST, PORT = "localhost", 9999
data = " ".join(sys.argv[1:])
# Create a socket (SOCK_STREAM means a TCP socket)
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as sock:
# Connect to server and send data
sock.connect((HOST, PORT))
sock.sendall(bytes(data, "utf-8"))
sock.sendall(b"\n")
# Receive data from the server and shut down
received = str(sock.recv(1024), "utf-8")
print("Sent: ", data)
print("Received:", received)サブコントローラ ⇔ Micro:bit間通信
通信方式
- 有線通信:USB Serial
- Baud rate:115200
- Raspberry Pi デバイス:/dev/ttyACM0
通信データ
- 走行時左右車輪駆動データ:±0~255 整数
- データフォーマット:lxxx,rxxx, (+は送信せず)
参考スクリプト
pyserialモジュールを使用したスレッド版は、以下のページ等を参考にして作成。

Raspberry Pi + PySerialでシリアル通信 - Qiita
はじめに Raspberry Piでシリアル通信したいと思い、USBシリアル変換を使った通信を試しました。 「Raspberry Piでシリアル通信試してみた」を参考にさせてもらいました。 コマンド送信→コマンド受信の順で処理することを前提...
qiita.com
メインコントローラ ⇔ ジョイスティック間通信
通信方式
- 2.4GHz 周波数帯
- Bluetooth Ver2.1+EDR
通信データ
- HID (Human Interface Device) プロファイル
- 入力データ: アナログスティックのX/Y座標
Dual Shock4関連モジュール
- ds4drv(sudo pip install ds4drv でインストール)
- ds4drv起動後 [error][controller 1] Failed to create input device: …. 表示
- errorの理由は不明だが動作する(ubuntu22.04非サポートの為か?)
参考ライブラリ(ROS2 Documentationページ参照)

Writing a simple publisher and subscriber (Python) — ROS 2 Documentation: Foxy documentation
docs.ros.org
ROS2インストール参考ページ

実習ROS 2 インストール - Qiita
概要 この記事では、ROS 2のインストール方法について説明する。 対応関係 ROSにはバージョンがあり、そのバージョンに応じてサポートされているOSのバージョンが異なる。 また、1つのバージョンのROSは複数のOSをサポートすることがあり...
qiita.com
ペアリング
- Linux PCのBluetoothを有効に
- DS4の中央 [PSボタン] を押してペアリング開始
- Linux PC側でWireless Controller(DS4)を検出したら接続する
IMU(9軸センサー)
- BNO055搭載モジュール (Bosch Sensortec製:I2C接続)
- 取得情報
- Gyro : 角速度センサーとして1秒間に物体がどれだけ3軸(XYZ)方向の角度変化量(rad/s)
- Euler : 3軸(XYZ)に対するオイラー角(roll: ±90°, pitch: ±180, yaw: 0~360)
- Acceleration : 3軸(XYZ)に対する重力+直線ベクトル+(m/s2)
- 精度:小数点以下4桁
- 将来の自立運転(SLAM)に使用する予定
- Raspberry Pi設定
- [設定]->[Control Center]->[インターフェース]->[I2C] 有効
- /boot/firmware/config.txt に dtparam=i2c_arm_baudrate=400000 を追加
- I2Cで接続されているデバイスの確認
- $ i2cdetect -y 1
- 表示されるアドレスを確認(0x29 等)
- 実行スクリプト(Python3)
- 以下のページに記載してあるPythonスクリプトのIC2アドレスを、上記で確認したアドレスに修正
- def __init__(self, sensorId=-1, address=0x29):
カメラ画像補正(広角や魚眼レンズの場合)
チェッカー柄による補正係数取得
- 様々な角度からチェッカー柄を撮影する(20枚程度)
- OSバージョンによりカメラ取得の方法を変更必要
- 画角、半径方向の歪み係数、円周方向の歪み係数を求める
- 以下ページ参照

魚眼レンズの補正 - Qiita
魚眼レンズの補正 はじめに 研究で使用しているドローンが魚眼レンズなため、取得した画像を補正する必要が出てきた。 参照から一般的な補正は、rectilinear補正らしく、opencvでできるみたいなので触ってみた。 環境構築 python...
qiita.com
画像補正
- map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), K, DIM, cv2.CV_16SC2)
- undistorted_img = cv2.remap(img, map1, map2, interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT)
補正後の画角を拡大
nK = K.copy()
nK[0,0]=K[0,0]/1.2
nK[1,1]=K[1,1]/1.2
map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), nK, DIM, cv2.CV_16SC2)以下ページ参照

Python で魚眼レンズの歪み補正
【経緯】使えれば幸い程度に.Python のバージョンは 3.8-32.使用カメラは ELP USB8MP02G-L180 (Amazon).【魚眼レンズの補正】・参考記事:魚眼レンズの補正 - Qiitaキャリブレーション用にチェッカー柄...
twinklesmile.blog42.fc2.com
micro:bit code(tiny:bitに実装)
初期化部
- シリアル通信:通信先をUSBに変更
- 変数を初期化:0を設定
受信部(無限ループ)
- 受信区切り:「 , 」カンマまで受信
- 左右区別:「 l 」⇒ 左ジョイスティック、「r」⇒ 左ジョイスティック値
- ジョイスティック値:操作量(文字列)を切り出して数値化(±0~255)
- 絶対値:逆方向用に準備
モーター駆動部(無限ループ)
- 左右操作量の符号が同一の場合
- 正値:CarCtrSpeed2 Run speed1=左量 speed2=右量 ⇒ 前方操作
- 負値:CarCtrSpeed2 Back speed1=左量 speed2=右量 ⇒ 後方操作
- 左右操作量の符号が逆の場合
- 左正/右負:CarCtrSpeed SpinRight speed=左量 ⇒ 右回りスピン操作
- 左負/右正:CarCtrSpeed SpinLeft speed=右量 ⇒ 左回りスピン操作
micro:bit表示部(ハート点滅ループ)
- ハートアイコン表示 ⇒ 1,000ミリ秒待ち ⇒ 小リングアイコン表示 繰り返し
micro:bit code

tinyBitCarController
Made with ❤️ in Microsoft MakeCode for micro:bit.
makecode.microbit.org
ロボット車両動作ビデオ
Pythonスクリプトに関して
メインコントローラ及びサブコントローラで実行される全ての送受信処理をスレッド化したスクリプトをgithubにて公開しておりますので、必要な方は下記「問い合わせフォーム」から問い合わせください。

コメント