
マスコンハンドルとブレーキハンドルを使用したコントローラの自作
「セガサターンの電車でGo専用コントローラ」を分解すると「セガ製コントローラを実装した基板(C基板と呼称)」、「マスコンレバー位置を検出する基板(M基板)」、「ブレーキ位置を検出する基板(B基板)」の3つの基板で構成させている。今回はブラックボックスであるセガ製コントローラをArduino Unoで置き換える事で、自由にマスコンとブレーキを使用できる独自コントローラに改造する。
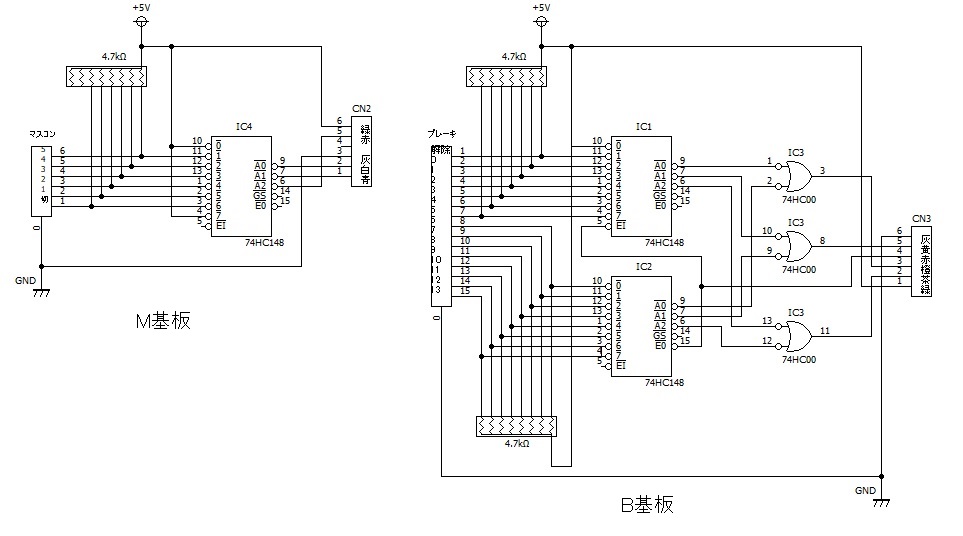
まず、C基板からM基板とB基板へ接続するコネクタを半田ゴテを使用して外します。MとB基板の回路図は以下に示され、M基板のレバー位置(6段階)検出にはエンコーダIC(74HC148)を1個、B基板のレバー位置(15段階)検出にはエンコーダIC(74HC148)を2個使用してそれぞれ3及び4本の信号をコネクタに出力する。
この位置情報信号7本と電源(+5VとGND)をArduino Uno基板に以下の図の様に接続する。
また、コントローラ中央下の [SELECT ボタン] でGNDと<接触接続>される側の基板パターンに半田付けで信号線を引き出し、位置情報信号線同様にArduino Uno基板のデジタル13ピンに、選択表示用のLEDは12ピンに接続する。
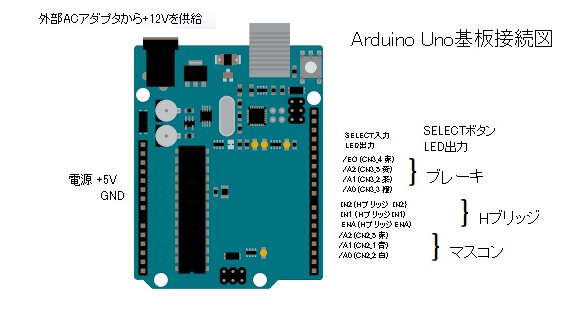
Arduino Uno基板のデジタル5/6/7ピンはPWM出力電源を構成するHブリッジ(L298Nモータードライバモジュール)の制御信号(A側)に接続し、+12V DC電源入力をPWM変換後の出力をNゲージ用電源に使用する。
以下は ㈱ 若松通商のL298Nモータードライバモジュールの紹介ぺージです。

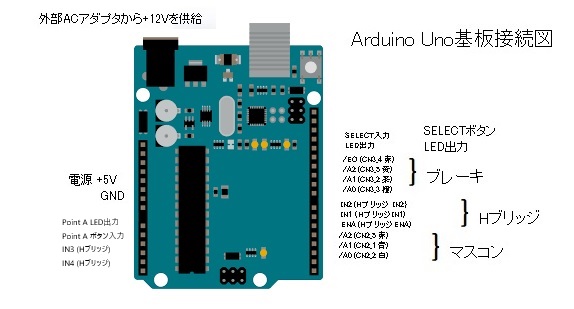
次に、Hブリッジの使用していないチャンネルを利用して線路のポイント切り替えを行う。KATO社製ポイントの切り替えは、内臓電磁石に正負電圧を印加する必要がある為、Hブリッジの+12V DC電源入力をPWM機能を利用して正負電圧を作り出す。
コントローラ右下の [A ボタン] でGNDと<接触接続>される側の基板パターンに半田付けで信号線を引き出し、Arduino Uno基板のアナログA1ピンに、選択表示用のLEDはA0ピンに接続する。
Hブリッジ制御用IN3とIN4はArduino Uno基板のアナログA2ピン、A3ピンに接続する(EN信号はジャンパーピンで+5Vに接続)。
以上の追加結線図を下記に示す。

コメント